Introduction
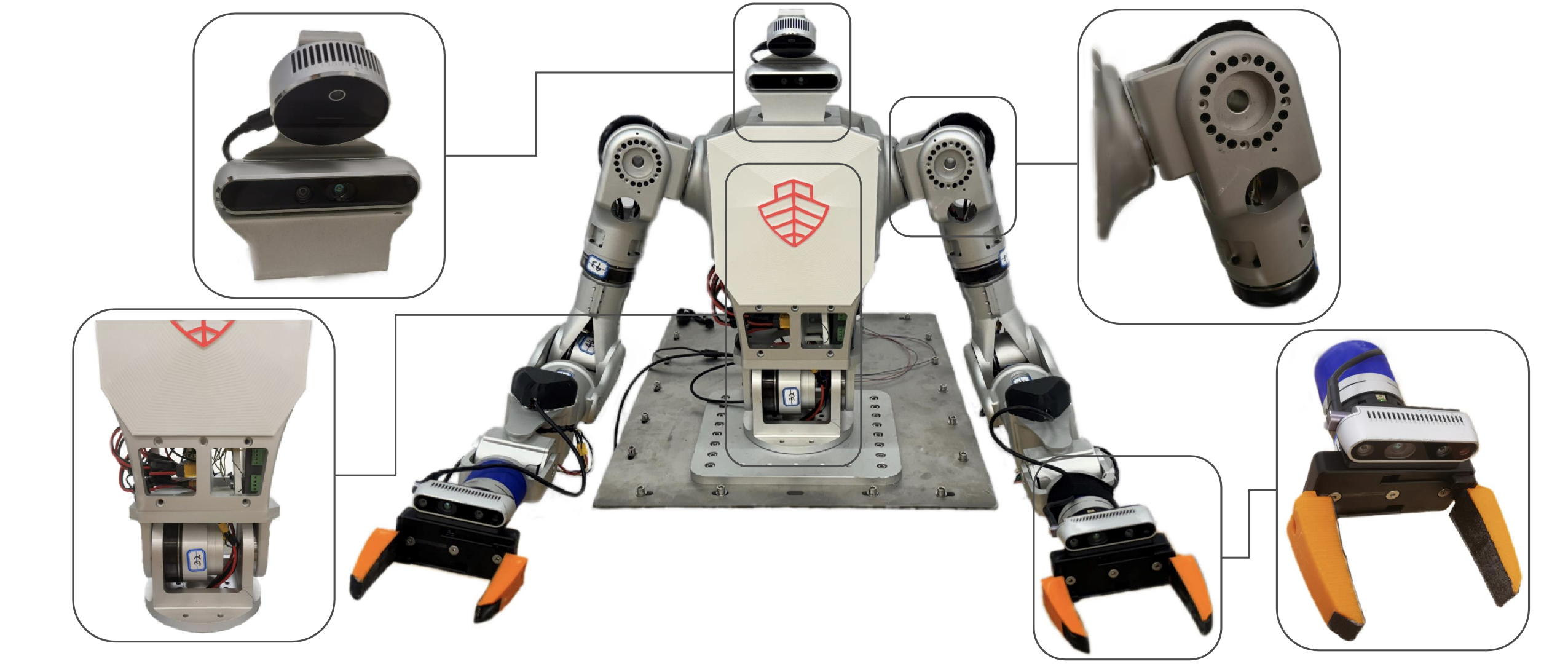
Welcome to the OpenPyRo-A1 documentation! This website hosts the hardware assembly guide and usage instructions for our open-source robot.
This assembly guide will provide step-by-step instructions to help you build your OpenPyRo-A1 robot, ensuring a smooth and efficient assembly process.
Hardware Design
We consider the following three key principles when designing OpenPyRo-A1:
Low-cost: The robotic system is designed to be cost-effective while maintaining high performance. To minimize manufacturing expenses, the structure integrates 3D-printed components for non-load-bearing parts and CNC-machined aluminum alloy for critical structural elements.
Ease of repair: Features a modular design with accessible panels, standardized fasteners, color-coded wiring, and quick-release connections, facilitating straightforward maintenance.
Scalability: Supports modular firmware updates and includes pre-drilled expansion points, allowing seamless integration of new technologies.
Bill of materials (BOM)
Robot design and procurement resources
Joint motors procurement website:
link
Gripper motors procurement website:
link
Accessories procurement website:
link
CNC Machining website:
link
Motors
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
waist and chest |
|
2 |
motor model: ph25b |
arm motor 1 |
|
2 |
motor model: ph20b |
arm motor 2,3 |
|
4 |
motor model: ph17b |
arm motor 4,5 |
|
4 |
motor model: ph17b |
arm motor 6,7 |
|
4 |
motor model: ph14b |
gripper motor |
|
2 |
motor model: DM-J4310-2EC |



Body structure components
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
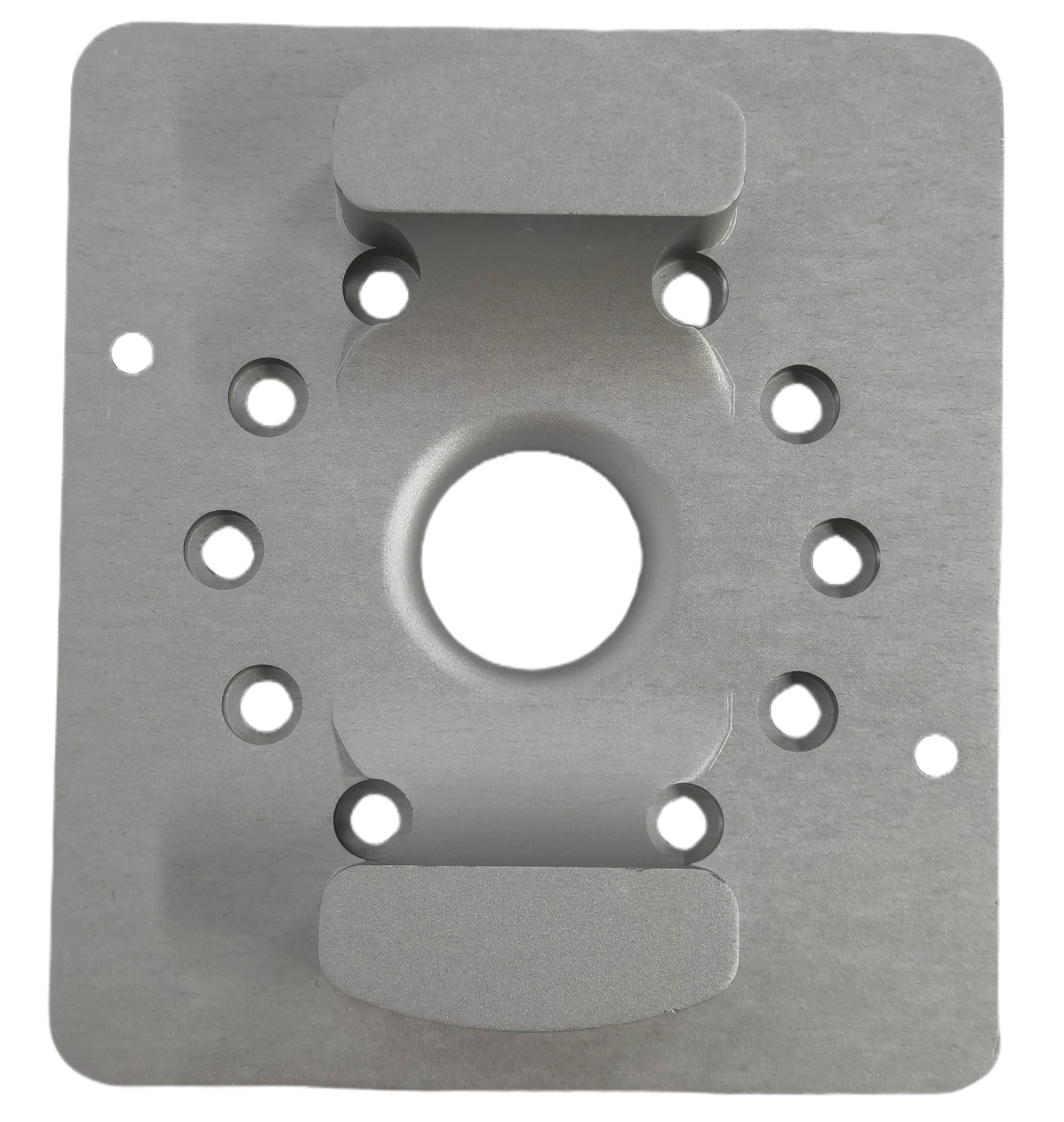
base plate |
|
1 |
which supports the upper body of the robot |
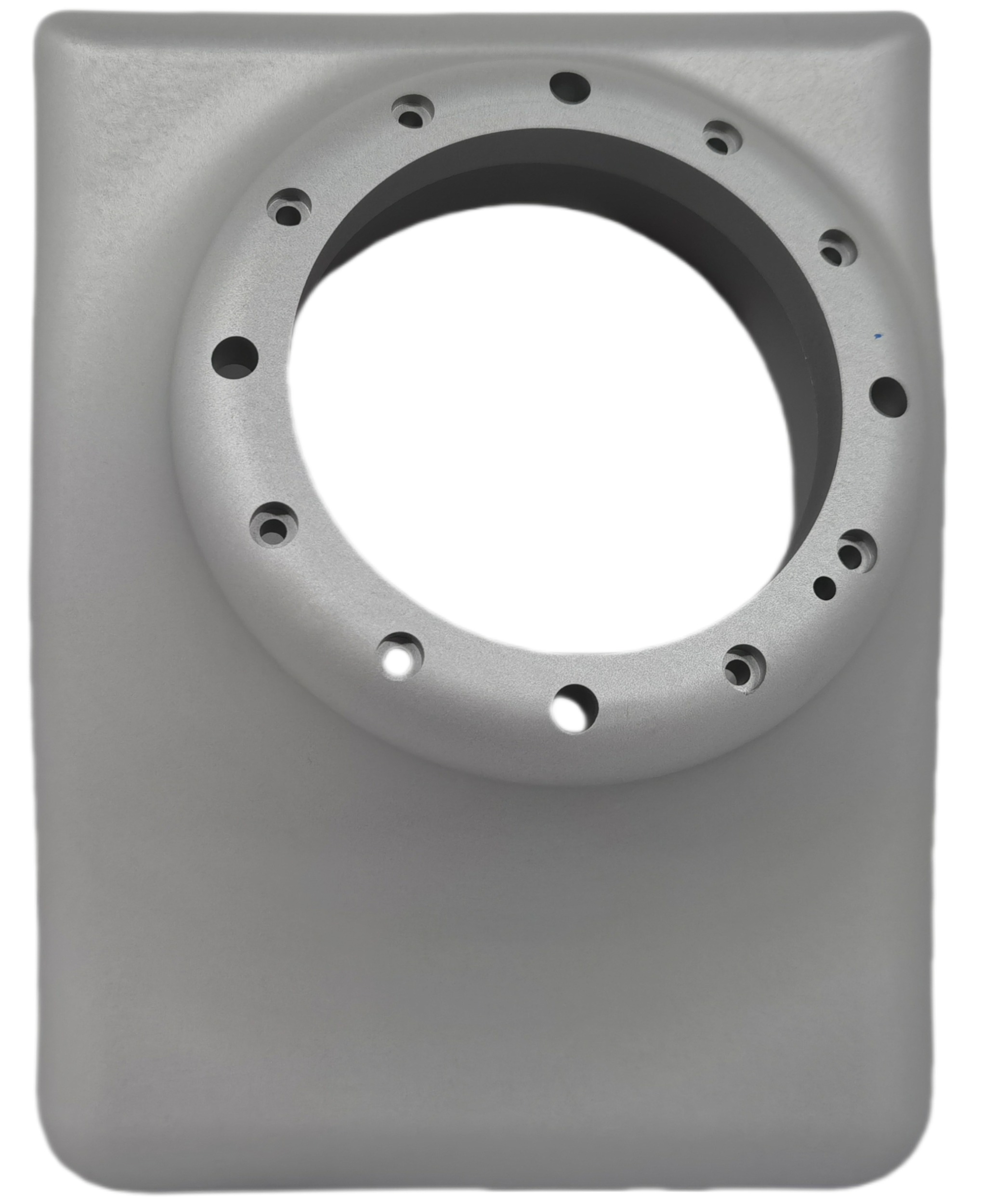
waist rotation |
|
1 |
support the rotation of the waist |
waist left fixing |
|
1 |
used to fix the waist motor |
waist right fixing |
|
1 |
used with waist motor fixing plate |
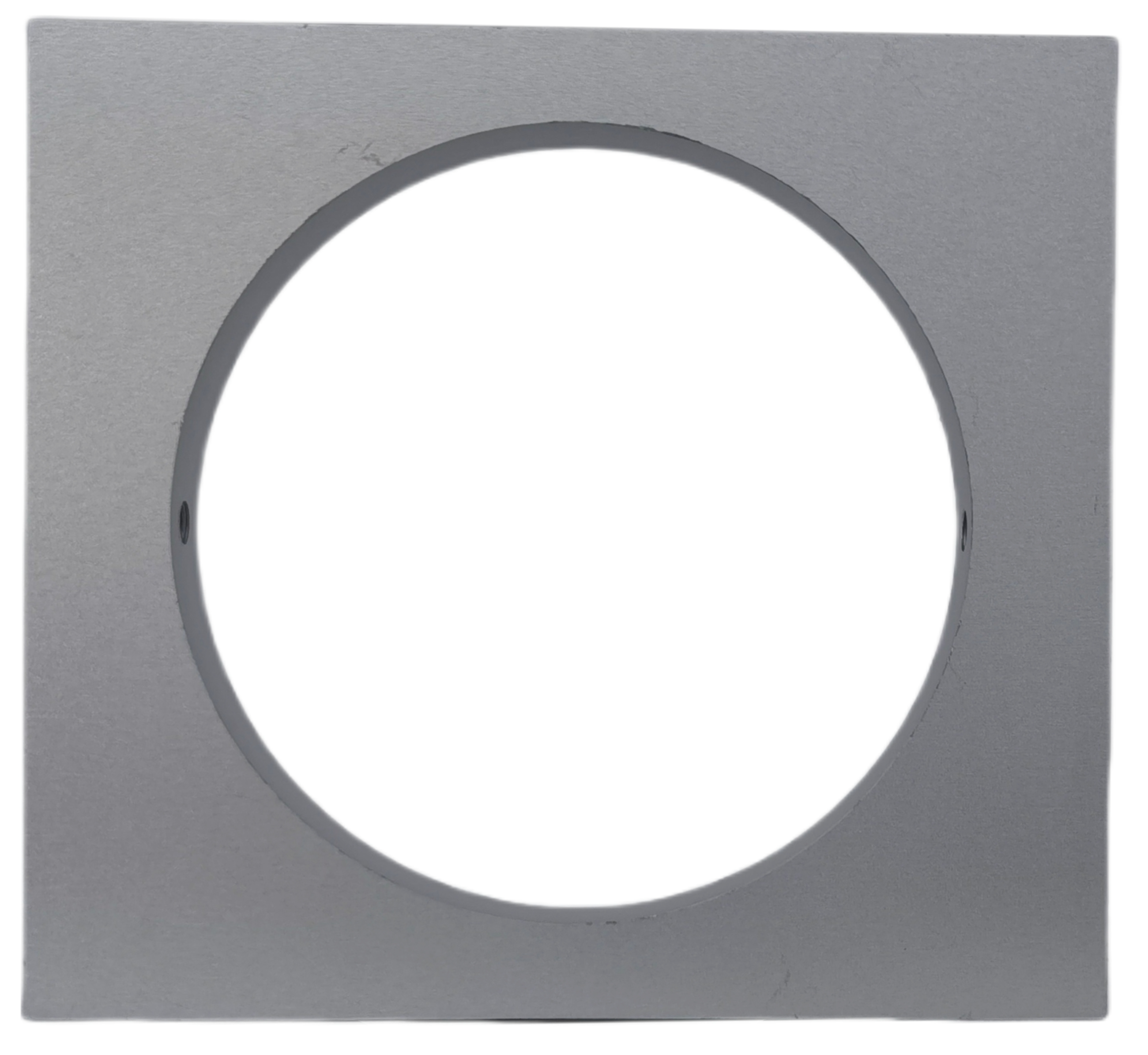
waist upper plate |
|
1 |
matched with the left and right fixing plates |
chest plate |
|
2 |
front and rear panels of the torso |
scapular left |
|
1 |
used to fix the front and rear chest plates |
scapular right |
|
1 |
used to fix the front and rear chest plates |
head plate |
|
1 |
used for supporting head |
shoulder plate a |
|
2 |
shoulder motor connection plate a |
shoulder plate b |
|
2 |
shoulder motor connection plate b |
upper arm |
|
2 |
arm motor 2 and 3 connection component |
elbow left |
|
2 |
arm motor 3 and 4 connection component |
elbow right |
|
2 |
arm motor 3 and 4 connection component |
forearm left |
|
2 |
arm motor 4 and 5 connection component |
forearm right |
|
2 |
arm motor 4 and 5 connection component |
upper wrist |
|
2 |
suite for arm motor 5 |
wrist flange |
|
2 |
flange for arm motor 5 and 6 connection |











Screws
Name |
Image |
Quantity |
|---|---|---|
M3X5 |
|
100 |
M3X6 |
|
100 |
M3X8 |
|
100 |
M3X10 |
|
100 |
M3X12 |
|
100 |
M3X14 |
|
100 |
M3X16 |
|
100 |
M3X18 |
|
100 |
M3X20 |
|
100 |
M3X22 |
|
100 |
M3X25 |
|
100 |
M3X30 |
|
100 |
M3X35 |
|
100 |
M3X45 |
|
100 |
M3X70 |
|
100 |
M4X10 |
|
100 |
M4X12 |
|
100 |
M4X16 |
|
100 |
M4X30 |
|
100 |
M4X45 |
|
100 |
M5X10 |
|
100 |
M5X20 |
|
100 |
M6X12 |
|
100 |
M6X22 |
|
100 |
M6X30 |
|
100 |
M8X20 |
|
100 |

























Pins
Name |
Image |
Quantity |
|---|---|---|
pin_M3X30 |
|
20 |
pin_M4X6 |
|
20 |


Mechanical components
Name |
Image |
Quantity |
|---|---|---|
bearing (RU66) |
|
2 |
bearing (XRU2512) |
|
2 |
bearing (S6000ZZ) |
|
2 |
bearing retaining ring (10mm) |
|
2 |




Tools
Name |
Image |
Quantity |
|---|---|---|
screw glue |
|
1 |
hexagon wrench |
|
1 |
torque wrench |
|
1 |
vise |
|
1 |
wire stripper |
|
1 |
wire stripper |
|
1 |
needle nose pliers |
|
1 |
locking pilers |
|
1 |
diagonal pliers |
|
1 |
soldering fixture |
|
1 |
torque screwdriver |
|
1 |
usb red can |
|
1 |
can net |
|
1 |
power |
|
1 |
ark kinfe |
|
1 |
solder paste |
|
1 |
solder paste |
|
1 |
heat gun |
|
1 |
electric soldering iron |
|
1 |
electric drill |
|
1 |
file |
|
1 |
tweezers |
|
1 |
flexible shaft ratchet screwdriver |
|
1 |
lube |
|
1 |
screwdriver |
|
1 |
multimeter |
|
1 |
scissor |
|
1 |
gradienter |
|
1 |


























Accessories
Name |
Image |
Quantity |
|---|---|---|
XT30U m |
|
10 |
XT30U f |
|
10 |
XT60U m |
|
10 |
XT60U f |
|
10 |
cold pressed round terminal |
|
50 |
plastic shell |
|
50 |
lead free solder wire |
|
1 |
reed |
|
1 |
silicone wire |
|
1 |
power wire |
|
1 |
can wire |
|
20 |
vertical snap ring holder (GH1.25 3P) |
|
20 |
can base |
|
2 |
power base |
|
2 |
can board |
|
2 |
ribbon |
|
100 |
amphenol connector |
|
10 |
DC voltage reduction module |
|
10 |
type-c 16P |
|
5 |
anti-slip |
|
1 |
magnet ring |
|
10 |
adhesive tape |
|
1 |









.png)






Power system
Power wire
The power module provides 48V voltage, making power wire for power.
Material statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
power |
|
1 |
provide 48V voltage |
XT30U m connector |
|
1 |
used for lithium battery plug |
cold pressed round terminal |
|
1 |
used for electrical connection |
wire strippers |
|
1 |
stripping wires |
diagonal pliers |
|
1 |
cutting wires |
power wire |
|
1 |
power wire material |
Assemble video(4X speed)
CAN system
CAN wire
Produce CAN signal wire for communication between CAN device and motors.
Material statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
reed |
|
1 |
|
silicone wire |
|
1 |
|
wire strippers |
|
1 |
stripping wires |
wire stripper |
|
1 |
stripping wires |
diagonal pliers |
|
1 |
cutting wires |
Assemble video(4X speed)
Integration
This page will guide you through the process of assembling all components into the robot.
Waist motor
The waist motor provides the robot with the ability to rotate left and right. Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
waist motor |
|
2 |
motor model: ph25b, please see |
base plate |
|
1 |
support the upper body of the robot |
hexagon wrench |
|
1 |
used to tighten the screws |
torque wrench |
|
1 |
set torque to avoid screw stripping |
M8X20 |
|
6 |
fix plate and table |
M4X45 |
|
13 |
fix waist motor and plate |
Assemble video(4X speed)
Chest motor
The chest provide with one freedom to turn up and down, what we need as follows. Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
chest motor |
|
2 |
motor model: ph25b, please see |
waist left fixing |
|
1 |
used to fix the waist motor |
waist right fixing |
|
1 |
used with waist motor fixing plate |
waist upper plate |
|
1 |
matched with the left and right fixing plates |
waist rotation |
|
1 |
support the rotation of the waist |
hexagon wrench |
|
1 |
used to tighten the screws |
bearing(RU66) |
|
1 |
used for connecting chest motor and structural parts |
M4X30 |
|
32 |
fix components |
M4X45 |
|
12 |
fix components |
M4X16 |
|
16 |
fix components |
M6X12 |
|
6 |
fix components |
Assemble video(4X speed)
Firstly, assemble the chest motor and its components.
Secondly, assemble chest motor turntable components.
Right shoulder motor 0
From the perspective of the robot, the first motor of the right arm, what we need as follows. Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
scapular_right |
|
1 |
used to fix the front and rear chest plates |
arm motor 1 |
|
1 |
motor model: ph20b |
shoulder plate a |
|
1 |
shoulder motor connection plate a |
M6X22 |
|
8 |
fix scapular right and chest plates |
M3X45 |
|
8 |
fix right shoulder motor and right scapular |
M3X30 |
|
14 |
fix shoulder plate a and right motor |
torque wrench |
|
1 |
set torque to avoid screw stripping |
hexagon wrench |
|
1 |
used to tighten the screws |
Assemble video(4X speed)
Waist motor zero adjustment
The waist motor is adjusted to its zero position through software.
Material Statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
usb red can |
|
1 |
connect to motor for testing |
M3X30 |
|
1 |
fix support plate and waist motor |
locking pilers |
|
1 |
pulling out pins |
power |
|
1 |
provide 48V voltage |
power wire |
|
1 |
power wire material |
Assemble video(4X speed)
Shoulder motor zero adjustment
The shoulder motor is adjusted to its zero position through software.
Material Statement
Name |
Image |
Quantity |
Notes |
|---|---|---|---|
usb red can |
|
1 |
connect to motor for testing |
M3X30 |
|
1 |
fix support plate and waist motor |
locking pilers |
|
1 |
pulling out pins |
power |
|
1 |
provide 48V voltage |
power wire |
|
1 |
power wire material |
Assemble video(4X speed)
Ph14b motor adjustment
Modify the wiring of the motor in ph14b.
Material Statement
Name |
Image |
Quantity |
|---|---|---|
can wire |
|
1 |
ph14b motor |
|
1 |
XT30U m connector 2 |
|
1 |
hexagon wrench |
|
1 |
ark kinfe |
|
1 |
wire stripper |
|
1 |
solder paste |
|
1 |
needle nose pliers |
|
1 |
plastic shell |
|
50 |
diagonal pliers |
|
1 |
heat gun |
|
1 |
soldering fixture |
|
1 |
lead free solder wire |
|
1 |
power wire |
|
1 |
electric soldering iron |
|
1 |
silicone wire |
|
1 |
reed |
|
5 |
electric drill |
|
1 |
file |
|
1 |
tweezers |
|
1 |
Assemble video(4X speed)
Right shoulder motor 1
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
M3X14 |
|
8 |
M3X20 |
|
8 |
M3X25 |
|
8 |
M3X35 |
|
8 |
M5X20 |
|
8 |
bearing(XRU2512) |
|
2 |
hexagon wrench |
|
1 |
torque wrench |
|
1 |
upper arm |
|
1 |
torque screwdriver |
|
1 |
shoulder plate b |
|
1 |
Assemble video(4X speed)
Right shoulder motor 2
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
M3X12 |
|
8 |
M3X16 |
|
8 |
M3X22 |
|
8 |
M3X30 |
|
8 |
M3X70 |
|
8 |
motor |
|
1 |
flexible shaft ratchet screwdriver |
|
1 |
hexagon wrench |
|
1 |
forearm left |
|
1 |
forearm right |
|
1 |
wrist flange |
|
1 |
torque screwdriver |
|
1 |
elbow right |
|
1 |
elbow left |
|
1 |
lube |
|
1 |
bearing (S6000ZZ) |
|
1 |
bearing retaining ring (10mm) |
|
1 |
Assemble video(4X speed)
Can data board
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
vertical snap ring holder (GH1.25 3P) |
|
1 |
can net |
|
1 |
can base |
|
1 |
can board |
|
1 |
ribbon |
|
10 |
solder paste |
|
1 |
M3X5 |
|
10 |
wire stripper |
|
1 |
can wire |
|
20 |
diagonal pliers |
|
1 |
heat gun |
|
1 |
silicone wire |
|
1 |
screwdriver |
|
1 |
tweezers |
|
1 |
Assemble video(4X speed)
Power board
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
amphenol connector |
|
1 |
DC voltage reduction module |
|
10 |
multimeter |
|
1 |
M3X10 |
|
5 |
M3X14 |
|
5 |
M4X10 |
|
5 |
type-c 16P |
|
1 |
XT30U m |
|
1 |
XT60U m |
|
1 |
XT60U f |
|
1 |
power base |
|
1 |
cold pressed round terminal |
|
5 |
wire stripper |
|
1 |
diagonal pliers |
|
1 |
heat gun |
|
1 |
soldering fixture |
|
1 |
lead free solder wire |
|
1 |
solder paste |
|
1 |
power |
|
1 |
power wire |
|
1 |
electric soldering iron |
|
1 |
vise |
|
1 |
screwdriver |
|
1 |
Assemble video(4X speed)
Right gripper
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
hexagon wrench |
|
1 |
scissor |
|
1 |
lube |
|
1 |
pin_M4X6 |
|
4 |
gripper motor |
|
1 |
Assemble video(4X speed)
Left shoulder motor 0
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
waist left fixing |
|
1 |
waist right fixing |
|
1 |
arm motor 1 |
|
1 |
M3X30 |
|
8 |
M3X45 |
|
8 |
M6X22 |
|
8 |
scapular right |
|
1 |
hexagon wrench |
|
1 |
torque wrench |
|
1 |
torque screwdriver |
|
1 |
shoulder plate a |
|
1 |
shoulder plate b |
|
1 |
Assemble video(4X speed)
Left shoulder motor 1
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
M3X14 |
|
8 |
M3X20 |
|
8 |
M3X25 |
|
8 |
M3X35 |
|
8 |
M5X20 |
|
8 |
arm motor 2,3 |
|
2 |
bearing (XRU2512) |
|
1 |
hexagon wrench |
|
1 |
torque wrench |
|
1 |
upper arm |
|
1 |
torque screwdriver |
|
1 |
can wire |
|
6 |
shoulder plate b |
|
1 |
Assemble video(4X speed)
Left shoulder motor 2
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|
|---|---|---|---|
M3X12 |
|
8 |
|
M3X16 |
|
8 |
|
M3X18 |
|
8 |
|
M3X22 |
|
8 |
|
M3X30 |
|
8 |
|
M3X70 |
|
8 |
|
arm motor 4,5 |
|
4 |
motor model: ph17b |
flexible shaft ratchet screwdriver |
|
1 |
|
hexagon wrench |
|
1 |
|
forearm left |
|
1 |
|
forearm right |
|
1 |
|
upper wrist |
|
1 |
|
wrist flange |
|
1 |
|
elbow left |
|
1 |
|
elbow right |
|
1 |
|
lube |
|
1 |
|
bearing (S6000ZZ) |
|
2 |
|
bearing retaining ring (10mm) |
|
1 |
Assemble video(4X speed)
Left gripper
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
hexagon wrench |
|
1 |
scissor |
|
1 |
lube |
|
1 |
pin_M4X6 |
|
4 |
gripper motor |
|
1 |
Assemble video(4X speed)
Wire tidy up
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
M6X30 |
|
10 |
hexagon wrench |
|
1 |
magnet ring |
|
10 |
Assemble video(4X speed)
Motor number
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
power |
|
1 |
power wire |
|
1 |
Assemble video(4X speed)
Arms zero adjustment
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
usb red can |
|
1 |
pin_M3X30 |
|
5 |
locking pilers |
|
1 |
gradienter |
|
1 |
power |
|
1 |
power wire |
|
1 |
Assemble video(4X speed)
Whole tidy up
Please follow the instructions to assemble.
Material statement
Name |
Image |
Quantity |
|---|---|---|
usb red can |
|
1 |
adhesive tape |
|
1 |
power |
|
1 |
power wire |
|
1 |